

A new robotic system capable of planetary exploration through tethered jumping has been developed by researchers at the Robotics and Mechanisms Laboratory (RoMeLa) at the University of California, Los Angeles (UCLA). The robot, named SPLITTER (Space and Planetary Limbed Intelligent Tether Technology Exploration Robot), has been designed as a modular, multi-robot system composed of two quadrupedal robots connected by a tether. The system, expected to be presented at the IEEE Aerospace Conference (AeroConf) 2025, has been designed to navigate low-gravity environments such as the moon and asteroids. Reports indicate that the robotic system can perform successive jumps while collecting scientific data, providing an alternative to conventional planetary rovers and drones.
SPLITTER’s Design and Capabilities
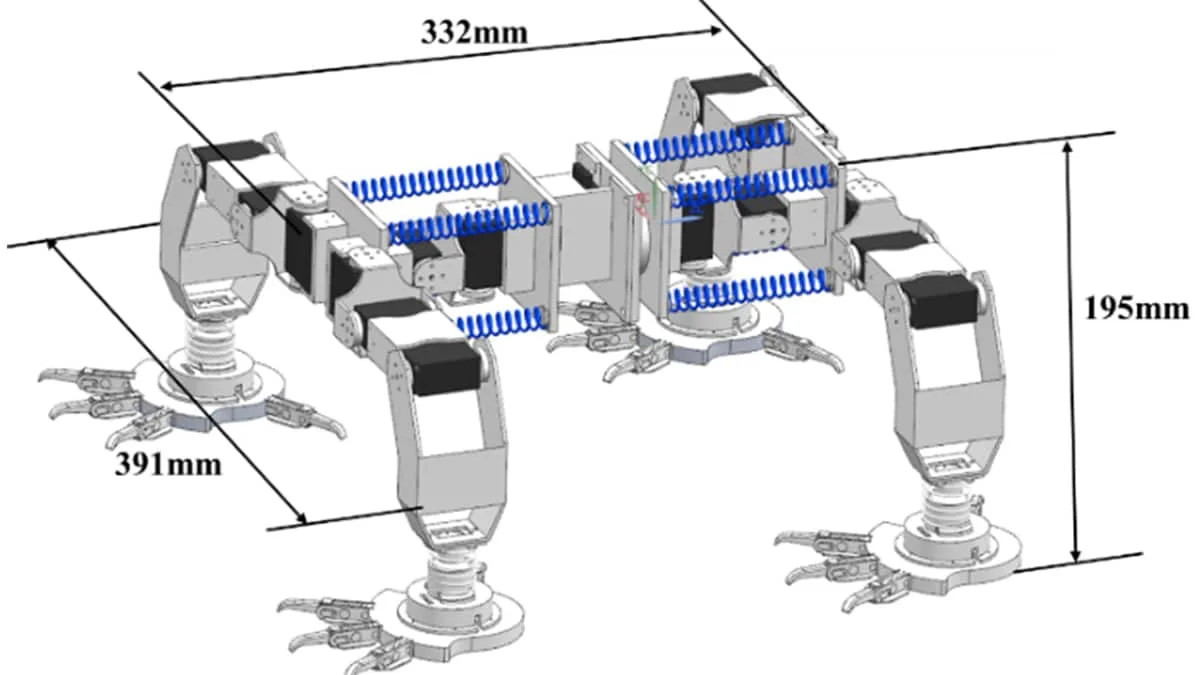
According to the study published on the arXiv preprint server, SPLITTER consists of two Hemi-SPLITTER robots connected by a tether, forming a dumbbell-like structure. The tether enables mobility and stability during mid-air travel, eliminating the need for additional attitude control mechanisms such as gas thrusters or reaction wheels. The system has been designed to dynamically alter its inertia by adjusting limb positions and tether length, ensuring stability during flight. The development of SPLITTER was driven by the limitations of traditional planetary rovers, which are often slow and cumbersome, and the impracticality of drones due to the absence of atmospheric conditions on celestial bodies like the moon and asteroids.
Mechanism Behind SPLITTER’s Motion
Reports suggest that SPLITTER incorporates an inertial morphing mechanism based on a Model Predictive Controller (MPC) to regulate its orientation during mid-air movements. The concept is based on the Tennis Racket Theorem, also known as the Dzhanibekov effect, which describes how objects with asymmetric inertia undergo spontaneous rotational flips. Yusuke Tanaka, lead author of the study, told Tech Xplore that the technique allows aggressive stabilization of the robot’s mid-air flight through controlled inertia adjustments. It has been suggested that this method significantly enhances the efficiency of planetary exploration by ensuring stability without relying on external force mechanisms.
Potential Applications and Future Research
The research team has indicated that SPLITTER could be deployed in planetary exploration missions as a swarm of robots, allowing extensive and unstructured terrain to be efficiently traversed. The tether mechanism could also enable one unit to explore craters or caves while the other remains anchored, providing support. Dennis Hong, director of RoMeLa and principal investigator of the project, told Tech Xplore that ongoing research is focusing on improving the hardware, including new actuators and sensing mechanisms. Future studies are expected to further validate the inertial morphing mechanism through high-fidelity simulations, with the long-term goal of enhancing SPLITTER’s capabilities for real-world space applications.
For the latest tech news and reviews, follow Gadgets 360 on X, Facebook, WhatsApp, Threads and Google News. For the latest videos on gadgets and tech, subscribe to our YouTube channel. If you want to know everything about top influencers, follow our in-house Who’sThat360 on Instagram and YouTube.